InertialNav 0.3.12
Paid Version
Publisher Description

InertialNav - A toolbox for inertial navigation.
InertialNav App is a toolbox for inertial navigation. It uses information from sensors (e.g. accelerometer, gyroscope, magnetometer, and GPS), when available, to derive attitude, position and velocity information.
Recent methods are used in InertialNav App to provide reliable and robust attitude estimation. InertialNav App can provide an attitude estimation that is, in average, unbiaised by local accelerations, taking the most from low-grade sensors generally available in handset and tablets.
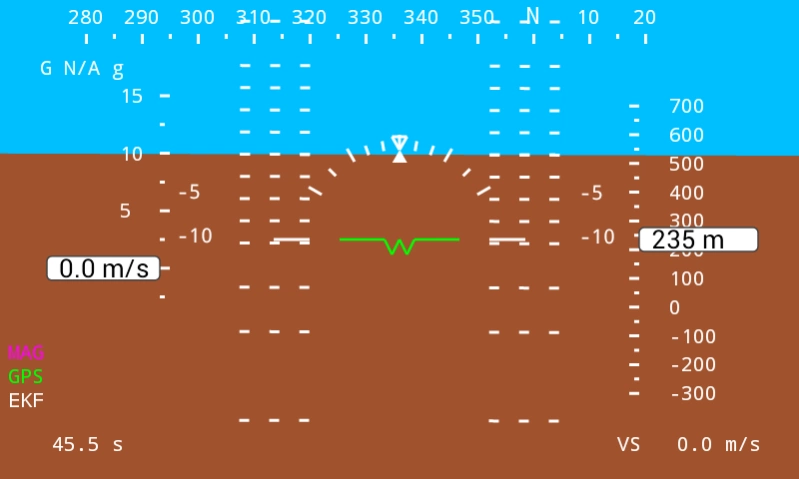
It includes the following instruments:
✔ artificial horizon / gyro attitude indicator,
✔ altimeter,
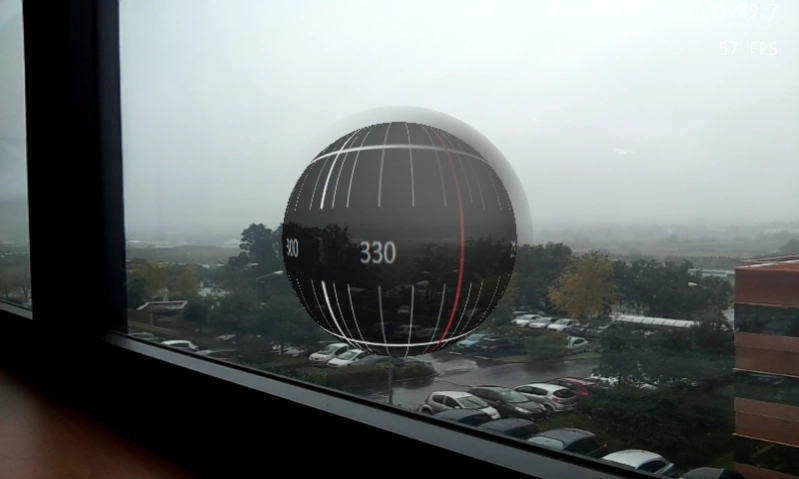
✔ 3D compass (gyro, magnetic) that works in every orientations,
✔ speed meter (ground speed, vertical speed),
✔ ground track.
An optimal filter is used to estimate as accurately as possible attitude and position of the device. Bear in mind, though, that phones usually have low-quality sensors.
In addition:
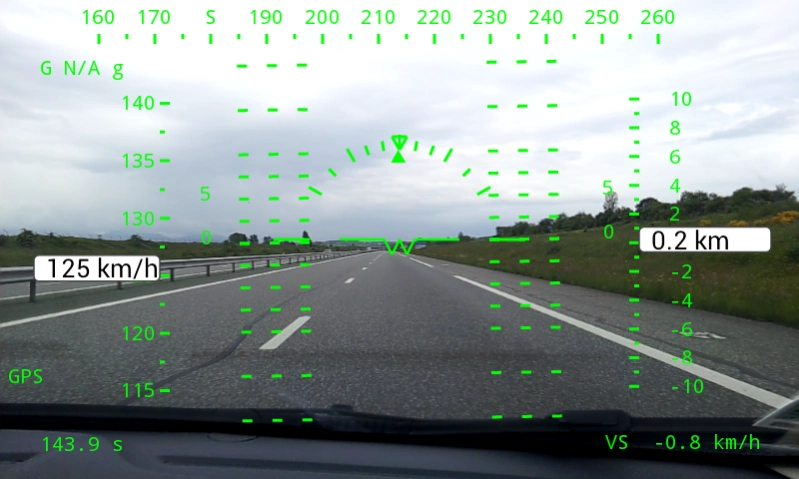
✔ A HUD mode allows using the application for augmented reality.
✔ You can display a Google Map for your position,
✔ You can monitor the sensors in your Android device,
✔ You can store real-time measurements and estimations into GPX file (GPS measures only), text files or, send these measurement over a wifi internal network with UDP, for post-processing (e.g. into MATLAB, SciLab, LabView, ...).
✔ complete set of options allow you to fine tune the apps to your particular needs. If a feature is missing, do not hesitate to ask!
HOW DOES IT WORK?
In real life environment, sensors tend to measure noises in addition to the physical quantity of interest. The current application provides an estimate of the attitude. To have the best estimation of the attitude an data fusion (EKF, UKF) is used. The filter purpose is to reject all perturbations, but to do so efficiently, it needs different sources of measurments. Considering we are interested by the orientation, and your device is indeed an inertial measurement unit (IMU with gyroscopes, accelerometers and so on), using gyroscopes for angular velocity and a set of measurements from accelerometers and magnetometers, InertialNav can indeed estimate the attitude with the filter.
That is, to estimate the attitude, InertialNav will sometimes discard information from the sensors that it deems unreliable or too noisy - it may sometimes favour the attitude measurements rather than the angular velocity integration and vice versa - to minimise the covariance of the error. Furthermore, quaternion formulation for the orientation makes the estimation very robust.
Additionally, if GPS is available, sub-meter positioning can be obtained. That is, this can not work efficiently indoors (drift in position and velocity).
** IMPORTANT ** : depending on your device, please consider going through the covariance settings for best estimation of the attitude! InertialNav may disregard the measurements if deemed unreliable. If YOU THINK the app does not use the gyroscopes, please CHECK the variance settings for the gyroscopes.
OUTPUTS
Data can be saved as a text file on the SD card.
Data can also be send over UDP local wifi network. Data are send as float (4 bytes, Little endian), as following:
[time, Measured Acceleration {X, Y, Z}, Measured Orientation {Pitch, Roll, Yaw}, Magnetic Field {X, Y, Z}, Pitch Estimate, Roll Estimate, Yaw Estimate]
MINIMUM REQUIREMENTS
Minimum requirements: accelerometers, gyroscopes, magnetometers.
Optional requirements: GPS, camera.
- Groundtrack mode will only be available when GPS is enabled,
- HeadUp Display will only be available when a camera is available,
- Multiple panels only available for 7" and above screen size.
The application is provided as-is, without any warranty. The application is not certified for navigation purposes by any agency or organisation. It should not be used as navigation instrument in a plane!
If you find bugs, please report them by email. Thanks!
About InertialNav
InertialNav is a paid app for Android published in the Geography list of apps, part of Education.
The company that develops InertialNav is JTO. The latest version released by its developer is 0.3.12. This app was rated by 1 users of our site and has an average rating of 5.0.
To install InertialNav on your Android device, just click the green Continue To App button above to start the installation process. The app is listed on our website since 2013-11-19 and was downloaded 30 times. We have already checked if the download link is safe, however for your own protection we recommend that you scan the downloaded app with your antivirus. Your antivirus may detect the InertialNav as malware as malware if the download link to com.olympio.inav is broken.
How to install InertialNav on your Android device:
- Click on the Continue To App button on our website. This will redirect you to Google Play.
- Once the InertialNav is shown in the Google Play listing of your Android device, you can start its download and installation. Tap on the Install button located below the search bar and to the right of the app icon.
- A pop-up window with the permissions required by InertialNav will be shown. Click on Accept to continue the process.
- InertialNav will be downloaded onto your device, displaying a progress. Once the download completes, the installation will start and you'll get a notification after the installation is finished.
